Comment contrôler le lanceur ?
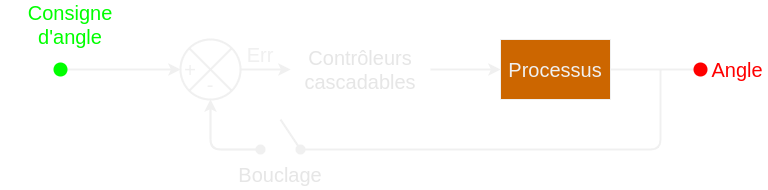
Le système de contrôle du lanceur.
Le système de contrôle est constitué de contrôleurs mises en cascade. Le bouclage du système est activable par le script.
Liste des contrôleurs disponibles :
- PID (Proportional Integral Derivative)
- Avance de phase
- Retard de phase
Comment ajouter un contrôleur ?
Contrôleur PID :
La commande pour ajouter un contrôleur PID est add_pid_control(KP, KI, KD).
Les trois paramètres sont :
KP: Gain de l'action proportionnelle.KI: Gain de l'action intégrale.KD: Gain de l'action dérivée.
Contrôleur avance/retard de phase :
La commande pour ajouter un contrôleur avance/retard de phase est add_phase_control(a, Tc, K).
Les trois paramètres sont :
a: Coefficient.Tc: Constante de temps.K: Gain.
Comment boucler le système ?
La commande pour boucler le système est loop().